一、选择和启动机器人程序
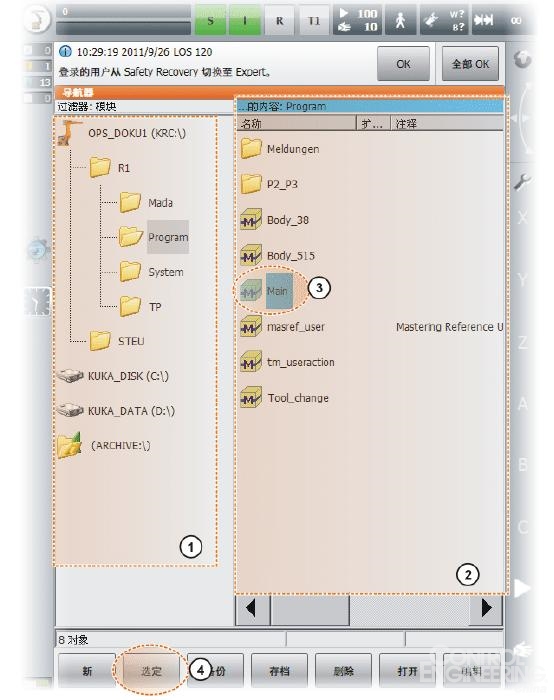
如果要执行一个机器人程序,则必须事先将其选中。 机器人程序在导航器中的用户界面上供选择。 通常,在文件夹中创建移动程序。 Cell 程序(由 PLC 控制机器人的管理程序) 始终在文件夹“R1” 中。
1 、导航器: 文件夹/ 硬盘结构。
2 、导航器: 文件夹/ 数据列表。
3 、选中的程序。
4 、用于选择程序的按键。
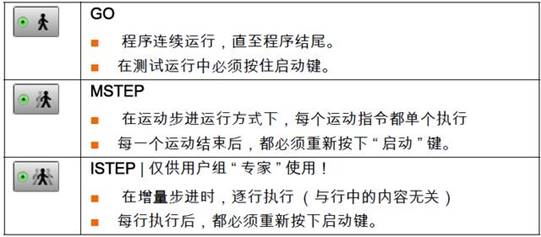
对于程序启动,有启动正向运行程序按键,和启动反向运行程序按键供选择。

如果运行某个程序,则对于编程控制的机器人运动,可提供多种程序运行方式:
二、机器人程序看起来是怎样的,请参考以下示意图:
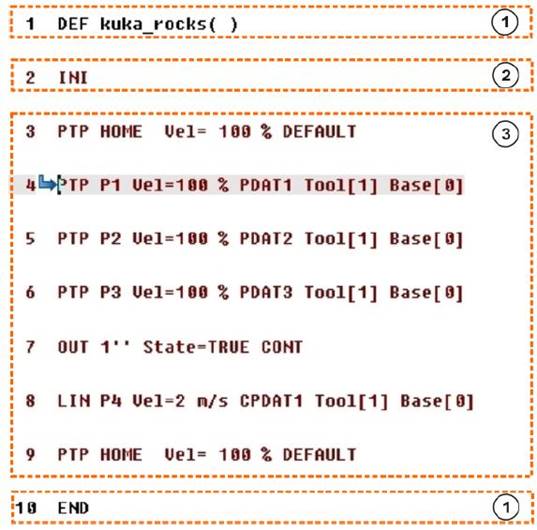
仅限于在专家用户组中可见:
(1)“DEF 程序名()” 始终出现在程序开头
(2)“END” 表示程序结束
(3) “INI” 行包含程序正确运行所需的标准参数的调用。
(4)“INI” 行必须最先运行!
(5)自带的程序文本,包括运动指令、等待/ 逻辑指令等
(6)行驶指令“PTP Home” 常用于程序开头和末尾,因为这是唯一的已知位置。
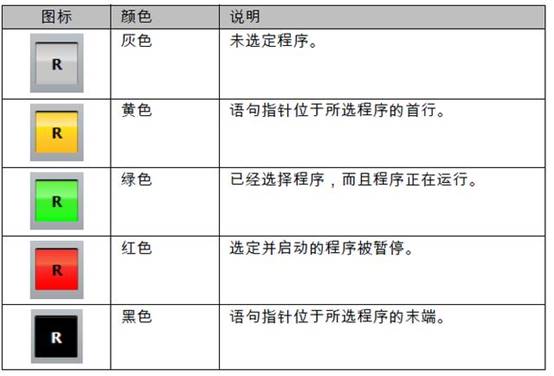
三、工业机器人的程序状态,请参考下图:
四、工业机器人启动程序的操作步骤:
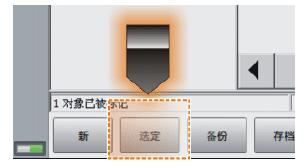
1、选择程序
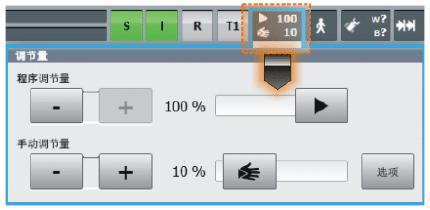
2、设定程序速度(程序倍率,POV)
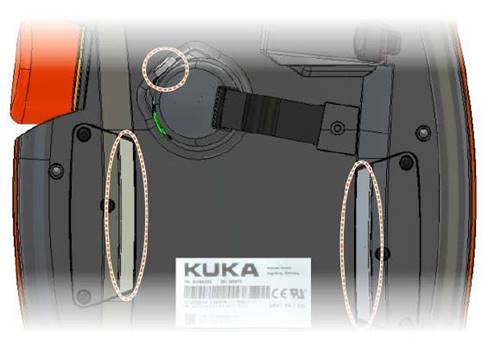
3、按确认键
4、按下启动键 (+) 并按住:
(1) “INI” 行得到处理。
(2) 机器人执行 BCO 运行。

注意:如果选定的运动语句包括 PTP 运行指令,则 BCO 运行将作为PTP 运动从实际位置移动到目标位置。 如果选定的运动语句包括 LIN 或 CIRC,则 BCO 运行将作为 LIN 运动被执行。 观察此运动,防止碰撞。 在 BCO 运行中速度自动降低。
5、到达目标位置后运动停止。
6、其他流程(根据设定的运行方式):
(1)T1 和 T2: 通过按启动键继续执行程序。
(2) AUT: 激活驱动装置。接着按动Start (启动)启动程序。
(3)在 Cell 程序中将运行方式转调为 EXT 并由 PLC 传送运行指令。